ガバナーSETUPのときの動作を調べようと思ってたんですが、アパートにsetup boxを忘れて実家に戻ってきたので、なーんにもできません…
その他にもケーブルが無いとかコネクタが無いとか絶妙に肝心なものが全て無くて…
しょうがないので初フリップに向けて練習しようかと思ったけど、実機じゃ当然できるわけもなく、シミュレータを動かそうと思ったらSmartPropoがつかいものにならず、PIC開発キットが無いので作ることもできない。。
妥協しまくってPS2パッドでやろうとしたら、Heli-Xが機体ロードでクラッシュして何をしても起動しない。。。
結局SuperCPを無意味にぶつけてピニオンとブレードとモーターコネクタを壊しただけでした。
2013年6月16日
BLHeli シリアル出力モニタ アップデート
シリアルモニタ機能をもうすこしアップデートしました。

・ビルド環境をRKit-51に移行したので、本当に必要な箇所以外は完全にオリジナルコードです。
・その結果、他のESC用にビルドしやすくなったので、未検証ですがいろんなESC用のHEXを同梱しました。
・通信速度を1200bpsに増やしました。分周比6.5が必要なんですが、1ビットごとに6と7分周を切り替えることでなんとか擬似的に実現しました。
・AD値を見て電圧を表示してみました。でもXP7Aでは機能しますが、Oversky doubleでは1023に張り付いて機能しません。ESCによるみたいです。
・PC側には一応グラフを付けました。目盛りすら書いてない手抜きですけど…
やっぱりファイルのアップロード方法がわからないので、RCGに最新版置き場を作りました。
いろんなESC用にビルドしようとしたことで、コードが大きすぎてターゲットによってはビルドできないことがわかりました。もっとダイエットするか、別の領域を使わせてもらうしかないです。
でも全体的にコードサイズは厳しいみたい。。。

・ビルド環境をRKit-51に移行したので、本当に必要な箇所以外は完全にオリジナルコードです。
・その結果、他のESC用にビルドしやすくなったので、未検証ですがいろんなESC用のHEXを同梱しました。
・通信速度を1200bpsに増やしました。分周比6.5が必要なんですが、1ビットごとに6と7分周を切り替えることでなんとか擬似的に実現しました。
・AD値を見て電圧を表示してみました。でもXP7Aでは機能しますが、Oversky doubleでは1023に張り付いて機能しません。ESCによるみたいです。
・PC側には一応グラフを付けました。目盛りすら書いてない手抜きですけど…
やっぱりファイルのアップロード方法がわからないので、RCGに最新版置き場を作りました。
いろんなESC用にビルドしようとしたことで、コードが大きすぎてターゲットによってはビルドできないことがわかりました。もっとダイエットするか、別の領域を使わせてもらうしかないです。
でも全体的にコードサイズは厳しいみたい。。。
2013年6月12日
テールブラシレス準備
すっかりBLHeli漬けの日々で、ヘリは飛ばすものじゃなくて机の上に固定してベンチテストするものになりつつあります。こんなことじゃいかん…
青ケーブルで取り出した信号をオシロで見ると、ハーフスロットル(つーかハーフラダー)は…
ではらだーを左いっぱいに切ってテールを止めると…
 またお前か!!!!
またお前か!!!!
さて、うちのまったりフライトではテールが負けるとかありえないので、テールモーターは7mm化すらせず純正6mmのままです。壊れたらV911用のスペア6mmにするか、V922用の7mmにするかなー、くらいに考えていたのですが、何気なくRCGでBLHeliのレポートをしてたら、「俺もOversky doubleを使ってダブルブラシレスにするぜ! という人が何人もいるのでとても心配になってきました。
自分で必要性を感じてないので、さすがにHP02Tをポチる勇気はなかったんですが、HobbyKingの$9 hexTronikモーターくらいなら無駄に持っててもいいか…と思って先日入手しておきました。
そんな今日この頃、nobさんがちょうどこの$9モーターで1SダブルブラシレスminiCPを作って飛ばしてはったので、これなら安心と真似することにしました。
まあ、違いはと言えばSuperCP君の困ったPWM信号ですね。テール側は綺麗だといいんだけど…
とにかくまずは信号取出しです。FET後から取ると負荷抵抗しだいで見え方が変わって嫌なので、とにかく生信号とりだし派です。
 |
| 赤が以前から取り出しているメインモータPWM 青が今回追加したテールモータPWM信号です GNDはどうせ電池コネクタで繋がってるのでESC基板内で確保します |
青ケーブルで取り出した信号をオシロで見ると、ハーフスロットル(つーかハーフラダー)は…
 |
| 大丈夫だ。問題ない。 |
ではらだーを左いっぱいに切ってテールを止めると…

なんなんでしょうねえSuperCPは。ソフトで出してるんだからノイズなんてわざわざ出さなきゃそうそう乗るもんじゃないと思うんですが…。まあメインと全く同じで、3ms周期のパルスノイズがゼロスロットル時に限り乗ることがわかりました。
テールモーターの物理的保持も考えなきゃいけないので、続きはまた後日。
2013年6月9日
BLHeli 回転数モニタ成功!
sskaugさんとXC90さんお二人に詳しく教えてもらって、ついに回転数の表示ができました。
なにが難しいって、回転数って何のこと?というのが難しくて…。いや未だにちゃんと理解できてませんが、とにかく式にあてはめてそれっぽい回転数が出るところまでは納得しました。

ガバナーの有無に関係なくちゃんと回転がわかるので、電池を持たすためにガバナーをOFFってる私のようなホバ専でも安心。
うちのSuperCPを計ってみましたが、やっぱ9Tじゃスロットルを全開にしなくてもけっこう早く回ってるもんですねえ。
nobさん推奨の3600rpmに近づけるには、ピニオンを8Tに下げてジーニアス64Tギアを使うのがとても良さそうです。
使い方の紹介
前提として、専用の改造BLHeliファームウェア10.64をESCに書き込みます。
こいつはXP-7A用の10.3をベースにしてますので、1S環境ならわりといろんなESCに使えるとは思いますが、うちではXP-7AとOversky/Origin doubleでしかテストしていません。
シリアル通信を追加した以外はまったく改造していませんが、シリアル通信の影響で何かおかしな動作をするか保証の限りではありません。うちでは特に違いなく飛んでいますけどね。
このファームウェアを使うと、ESCのプログラム書き込みに使うC2端子のうち、白のC2D線からシリアル通信でリアルタイムにモニタデータを吐きます。信号レベルは3.3VのUART、通信設定は600bpsのデータ8ビットパリティ無しです。
PCにつないでモニタするためには、まず3.3VのUART接続ができるシリアルポートが必要です。マイコン遊びをやってる人ならレベルコンバータやらFTDIモジュールやらあると思いますが、何も無い場合は秋月かストリナで3.3VUSBシリアル変換ケーブルを買うのが楽です。
接続は
ヘリ側 PC側
C2端子の黒(GND) ------ 変換ケーブルの黒(GND)
C2端子の白(C2D) ------ 変換ケーブルの黄(RX)
って感じにつなぎます。つまりヘリ側から一方的にしゃべるだけです。
んで、PCアプリのBLH_Monitor V0.0.0.2を起動して、シリアルポート番号を選んでconnectするだけです。あとはヘリの電源を入れれば通信が始まって、スロットル値やらガバナー目標値やら現在のモーター回転数やらローター回転数が表示されます。
ESCから取れるのは電気的な周波数(electric freq)だけなので、モーターのポール数(磁石の数)、ピニオン歯数、メインギア歯数を自分で入れないと正しい回転速度が出ません。デフォルト値はうちのSuperCPの値です! ちなみに値を覚えてくれないので今は起動するたびに入れなおす必要があります。すいません…
Bloggerにファイルを置く方法がわからんので、RCGのブログにソースとHEX、PCアプリを置きました。すみませんがあっちから拾ってください。。
なにが難しいって、回転数って何のこと?というのが難しくて…。いや未だにちゃんと理解できてませんが、とにかく式にあてはめてそれっぽい回転数が出るところまでは納得しました。

ガバナーの有無に関係なくちゃんと回転がわかるので、電池を持たすためにガバナーをOFFってる私のようなホバ専でも安心。
うちのSuperCPを計ってみましたが、やっぱ9Tじゃスロットルを全開にしなくてもけっこう早く回ってるもんですねえ。
nobさん推奨の3600rpmに近づけるには、ピニオンを8Tに下げてジーニアス64Tギアを使うのがとても良さそうです。
使い方の紹介
前提として、専用の改造BLHeliファームウェア10.64をESCに書き込みます。
こいつはXP-7A用の10.3をベースにしてますので、1S環境ならわりといろんなESCに使えるとは思いますが、うちではXP-7AとOversky/Origin doubleでしかテストしていません。
シリアル通信を追加した以外はまったく改造していませんが、シリアル通信の影響で何かおかしな動作をするか保証の限りではありません。うちでは特に違いなく飛んでいますけどね。
このファームウェアを使うと、ESCのプログラム書き込みに使うC2端子のうち、白のC2D線からシリアル通信でリアルタイムにモニタデータを吐きます。信号レベルは3.3VのUART、通信設定は600bpsのデータ8ビットパリティ無しです。
PCにつないでモニタするためには、まず3.3VのUART接続ができるシリアルポートが必要です。マイコン遊びをやってる人ならレベルコンバータやらFTDIモジュールやらあると思いますが、何も無い場合は秋月かストリナで3.3VUSBシリアル変換ケーブルを買うのが楽です。
接続は
ヘリ側 PC側
C2端子の黒(GND) ------ 変換ケーブルの黒(GND)
C2端子の白(C2D) ------ 変換ケーブルの黄(RX)
って感じにつなぎます。つまりヘリ側から一方的にしゃべるだけです。
んで、PCアプリのBLH_Monitor V0.0.0.2を起動して、シリアルポート番号を選んでconnectするだけです。あとはヘリの電源を入れれば通信が始まって、スロットル値やらガバナー目標値やら現在のモーター回転数やらローター回転数が表示されます。
ESCから取れるのは電気的な周波数(electric freq)だけなので、モーターのポール数(磁石の数)、ピニオン歯数、メインギア歯数を自分で入れないと正しい回転速度が出ません。デフォルト値はうちのSuperCPの値です! ちなみに値を覚えてくれないので今は起動するたびに入れなおす必要があります。すいません…
Bloggerにファイルを置く方法がわからんので、RCGのブログにソースとHEX、PCアプリを置きました。すみませんがあっちから拾ってください。。
2013年6月8日
BLHeli 回転数モニタへの道
電波の問題はともかくとして、Bluetoothなりなんなりでヘリから手元のPCへ情報を伝えることは簡単にできます。電波でなく有線であっても、とにかくヘリのいろんな情報をモニタできればセッティングや修理の際にとても役に立ちます。
温度や電圧は必要なら簡単にセンサーを付けるなりして知ることができますが、意外と困るのがローター回転数です。大型ヘリの高価な受信機やBESCにはモニタ機能があるのでモーター回転をモニタしてギア比で割ればわかりますが、我らがBLHeliファームウェアにはモニタ機能がありません。
ちょうど最近、XC90さんのブログでBLHeliのビルド方法を知ることができたので、モニタ出力ができるかトライしてみました。
将来のことを考えると、うまく動いたら自分だけではなくいろんな人に役立つ機能だと思います。そうすると、最大の困難はプログラム開発ではなく、出力端子のハンダ付けでしょう。
したがって、CPUそのものはシリアル通信機能を持っているのですが、自由にピンアサインができないので使わないことにしました。
取出しがもっとも簡単なのは、BLHeli利用者ならプログラム書き込みとセッティング用に既に外に出ているはずのC2インターフェイスです。
実はBLHeliBoxのメモリリードライト機能でちょいちょいとモニタができないかと考えたのですが、このC2インターフェイスはCPUをhaltしないと通信できないので、動作中の情報取出しには使えないと4712さんが教えてくれました。確かにCPUマニュアルを見たらはっきりそう書いてありました。
しかし、データ線のC2Dピンだけは、動作中にGPIOとして出力ができます。実際にソースを見ると、デバッグのためにこれをON/OFFさせて使っているような形跡もあります。
つまり、ソフトウェアシリアル通信さえ作れば、BLHeliファーム内のRAMをいろいろ外から眺めることができるはずです。
インテルのアセンブラは初めてなのでけっこう苦労しましたが、なんとかBLHeliファームウェアに、3.3V UARTのシリアル出力を追加することができました。
以下、コードの説明です。
ベースにしたのは純正10.3のソースに、XC90さんの紹介してくれたASEM-51でビルドするためのプリプロセッサ表記修正を加えたもの、です。
完全に未使用のタイマーは無いので、負荷の軽そうな128us周期のTimer2割り込みからシリアル出力ルーチンを呼び出すことにしました。
普通に毎回ビット出力をすると、1sec/128us = 7812bps になりますが、こんなビットレートを設定できるPCは普通ないと思います。マイコンなら読めると思いますが。
やはりPCから見られないと利便性が落ちると思ったので、13回に一度だけ処理をすることにして、7812/13=600.9bpsの通信速度に決定しました。
文字の取りこぼしもあり得るでしょうから、1パケット=8バイトとして、先頭バイトに必ず'U'の文字を出力してPCソフト側で同期をとることにします。
現在は試しに、8バイトの内容として
+0 アスキー文字 'U' 通信の 同期用
+1 Requested_Pwm 送信機からのPWM指令を0-255段階のスロットル値に直したもの?
+2 Governor_Req_Pwm ガバナーの目標出力を送信機PWMと同じく0-255で表現したもの?
+3 Gov_Integral_X ガバナー積分エラー 最上位バイト
+4 Gov_Integral_H ガバナー積分エラー Hバイト
+5 Gov_Integral_L ガバナー積分エラー Lバイト
+6 Gov_Proportional_H ガバナー比例エラー Hバイト
+7 Gov_Proportional_L ガバナー比例エラー Lバイト
を出力させています。
イメージとしては、Requested_Pwmでスロットル信号がわかって、ガバナーの目標回転数がGovernor_Req_Pwmでわかる。するとそこからのずれが、積分エラーと比例エラーに反映されるはずなので何か魔法の計算をすれば現在の回転数がわかる…はず? と考えました。
まあ、結論から言うと単位がわからないのと、単純に上記のようなものを意味する変数ではないみたいなので現時点では何もわからないんですが…。
とにかくRAMの変数を見ることはできるようになったので、後は計算でどうにでもなると思います。
場合によってはESC内でモニタ用の値を作って保持しても良いですしね。
動作風景
3.3VのUART出力なので、PC接続にはFTDIのTTL-232R-3V3を使いました。
http://www.ftdichip.com/Products/Cables/USBTTLSerial.htm
もちろんSuperCPしか持ってないのでこれでテストしています。複数の改造を混ぜるとデバッグが困難なので、XC90さんのSuperCP用改造版ではなく純正10.3をベースにして、CRノイズフィルタを付けて動かしています。

PC側の画面
こんなの。テストアプリなのでスカスカです。
回転数がちゃんと取れたらグラフとか出してあげたいです。

まだどうやれば回転数を取り出せるかもわかっていませんが、それ以前にガバナーを理解して自分の機体で使えていないので、BLHeli内のRAMのうちどんな情報をどんな形式でモニタするか考えるのは自力では無理があると思います。まずHeliFreakで聞いて反応を見てみようと思います。
最終的には、こういった機能は単独アプリではなくBLHeliSetupに内蔵されるほうが便利でしょうしね。
温度や電圧は必要なら簡単にセンサーを付けるなりして知ることができますが、意外と困るのがローター回転数です。大型ヘリの高価な受信機やBESCにはモニタ機能があるのでモーター回転をモニタしてギア比で割ればわかりますが、我らがBLHeliファームウェアにはモニタ機能がありません。
ちょうど最近、XC90さんのブログでBLHeliのビルド方法を知ることができたので、モニタ出力ができるかトライしてみました。
将来のことを考えると、うまく動いたら自分だけではなくいろんな人に役立つ機能だと思います。そうすると、最大の困難はプログラム開発ではなく、出力端子のハンダ付けでしょう。
したがって、CPUそのものはシリアル通信機能を持っているのですが、自由にピンアサインができないので使わないことにしました。
取出しがもっとも簡単なのは、BLHeli利用者ならプログラム書き込みとセッティング用に既に外に出ているはずのC2インターフェイスです。
実はBLHeliBoxのメモリリードライト機能でちょいちょいとモニタができないかと考えたのですが、このC2インターフェイスはCPUをhaltしないと通信できないので、動作中の情報取出しには使えないと4712さんが教えてくれました。確かにCPUマニュアルを見たらはっきりそう書いてありました。
しかし、データ線のC2Dピンだけは、動作中にGPIOとして出力ができます。実際にソースを見ると、デバッグのためにこれをON/OFFさせて使っているような形跡もあります。
つまり、ソフトウェアシリアル通信さえ作れば、BLHeliファーム内のRAMをいろいろ外から眺めることができるはずです。
インテルのアセンブラは初めてなのでけっこう苦労しましたが、なんとかBLHeliファームウェアに、3.3V UARTのシリアル出力を追加することができました。
以下、コードの説明です。
ベースにしたのは純正10.3のソースに、XC90さんの紹介してくれたASEM-51でビルドするためのプリプロセッサ表記修正を加えたもの、です。
完全に未使用のタイマーは無いので、負荷の軽そうな128us周期のTimer2割り込みからシリアル出力ルーチンを呼び出すことにしました。
普通に毎回ビット出力をすると、1sec/128us = 7812bps になりますが、こんなビットレートを設定できるPCは普通ないと思います。マイコンなら読めると思いますが。
やはりPCから見られないと利便性が落ちると思ったので、13回に一度だけ処理をすることにして、7812/13=600.9bpsの通信速度に決定しました。
文字の取りこぼしもあり得るでしょうから、1パケット=8バイトとして、先頭バイトに必ず'U'の文字を出力してPCソフト側で同期をとることにします。
現在は試しに、8バイトの内容として
+0 アスキー文字 'U' 通信の 同期用
+1 Requested_Pwm 送信機からのPWM指令を0-255段階のスロットル値に直したもの?
+2 Governor_Req_Pwm ガバナーの目標出力を送信機PWMと同じく0-255で表現したもの?
+3 Gov_Integral_X ガバナー積分エラー 最上位バイト
+4 Gov_Integral_H ガバナー積分エラー Hバイト
+5 Gov_Integral_L ガバナー積分エラー Lバイト
+6 Gov_Proportional_H ガバナー比例エラー Hバイト
+7 Gov_Proportional_L ガバナー比例エラー Lバイト
を出力させています。
イメージとしては、Requested_Pwmでスロットル信号がわかって、ガバナーの目標回転数がGovernor_Req_Pwmでわかる。するとそこからのずれが、積分エラーと比例エラーに反映されるはずなので何か魔法の計算をすれば現在の回転数がわかる…はず? と考えました。
まあ、結論から言うと単位がわからないのと、単純に上記のようなものを意味する変数ではないみたいなので現時点では何もわからないんですが…。
とにかくRAMの変数を見ることはできるようになったので、後は計算でどうにでもなると思います。
場合によってはESC内でモニタ用の値を作って保持しても良いですしね。
動作風景
3.3VのUART出力なので、PC接続にはFTDIのTTL-232R-3V3を使いました。
http://www.ftdichip.com/Products/Cables/USBTTLSerial.htm
もちろんSuperCPしか持ってないのでこれでテストしています。複数の改造を混ぜるとデバッグが困難なので、XC90さんのSuperCP用改造版ではなく純正10.3をベースにして、CRノイズフィルタを付けて動かしています。

PC側の画面
こんなの。テストアプリなのでスカスカです。
回転数がちゃんと取れたらグラフとか出してあげたいです。

まだどうやれば回転数を取り出せるかもわかっていませんが、それ以前にガバナーを理解して自分の機体で使えていないので、BLHeli内のRAMのうちどんな情報をどんな形式でモニタするか考えるのは自力では無理があると思います。まずHeliFreakで聞いて反応を見てみようと思います。
最終的には、こういった機能は単独アプリではなくBLHeliSetupに内蔵されるほうが便利でしょうしね。
2013年6月4日
V911 古典的バーレス化 (人間ジャイロ版)
V911のフライバーを撤去してみました。撤去するだけです!
当然ながら安定性がまるでなくなりますが、丁寧な調整と丁寧な操作でなんとか飛ばす、というシロモノ。昔はスケール機をやせ我慢してこうやって飛ばす人が多かった、とか本で読みました。
で、V911は元の素性が良いのでそこそこ飛びます。改造と言えばこの方KKDDMMさんの日記では一年以上前にさんざん紹介されています。ブレードに錘を貼って、ブレード自体のジャイロ効果を調整するのがポイントです。動画もありますよ。
その後funkunさんも試されてますが、送信機が純正なためあまり良い感じには飛ばなかったようです。
で、これは後に続くプロジェクトのための第一歩なわけですが、とりあえず現状
飛ばなくはないです。頑張ればそこそこ止められます。くいくい左右に振るのもクイックです。
動画で言えば25秒~35秒が左右にくいくい振ってみたところ。墜落間際の48秒からが前後にくいくい振ってるところです。
悪いところ。まずミソります。胴体がぶら下がってる分の力に抵抗できないので、水平に復元するわけでもないくせに傾いた状態を維持もできません。左右の操作バランスもすごく悪いです。つまるところピタホバ以外をさせるとサイクリック操作を止めたらろくなことになりません。
スワッシュ出力ポールは長い方の足で、プロポ設定はDRが75%のEXPが50%くらいです。
作り方は基本funkunさんと同じで簡単そのものです。まずは予備のブレードにリンクを接着します。
次はちょっと重要。今までスタビを支点にして動いてたのでスワッシュとブレードのプリセッションが45度で済んでましたが、バーレスにしたら直結するので90度ずれるようになります。うちはdevo7eなのでプロポ側で120度CCPMスワッシュのミックス設定をしてもいいですが、原始的にやるにはスワッシュの回り止め角度を45度ずらします。
ちょうどY911用の回り止めが二本あるスワッシュがあったので、これを使います。

V911の機体側は斜め後ろ45度に回り止めホルダがありますが、ここにスワッシュの後ろ側が来るように45度反時計回りにずらして装着します。


そのままでは数秒しか浮かないので、ブレードに0.5~1.5g程度のウェイトを貼ります。回転モーメントが増えればよいので、重いものを外周に貼るほど安定します。
 この写真じゃ糸ハンダで0.4gをかなり内周側まで伸ばして貼っているので、かなり安定は悪い方です。動画はこの状態で撮りましたが、かなり苦しそうなのがわかると思います。この後ウェイトを倍に増量したら手放しホバリングで数秒耐えるくらいになりました。その代わり運動性も落ちますけどね…
この写真じゃ糸ハンダで0.4gをかなり内周側まで伸ばして貼っているので、かなり安定は悪い方です。動画はこの状態で撮りましたが、かなり苦しそうなのがわかると思います。この後ウェイトを倍に増量したら手放しホバリングで数秒耐えるくらいになりました。その代わり運動性も落ちますけどね…
というわけでそこそこ飛ばすことはできますが、このままではあまり意味はありません。(飛ぶと言うこと自体に感動しますが)
ミソが消えないと傾けたまますっ飛ばしたりできないし、見た目上バーが無いのと、少しだけ電池が
長持ちするという以外、純正に対するメリットがありません。
KKDDMMさんの作例ではこの後、主翼の剛性をいろいろ調整してフラッピング等で安定度を稼ごうとしています。うちの場合は後付でジャイロをなんとかくっつけて、V911基板を生かしたまま介入してなんとかインチキバーレスシステムができないかと思っています。
とはいえ正統派の制御ができるわけではないので錘安定化より良い結果がでる保証は全くありませんし、まだ実験回路すら作ってないので失敗の可能性大です。いちおう乞うご期待ということで。
当然ながら安定性がまるでなくなりますが、丁寧な調整と丁寧な操作でなんとか飛ばす、というシロモノ。昔はスケール機をやせ我慢してこうやって飛ばす人が多かった、とか本で読みました。
で、V911は元の素性が良いのでそこそこ飛びます。改造と言えばこの方KKDDMMさんの日記では一年以上前にさんざん紹介されています。ブレードに錘を貼って、ブレード自体のジャイロ効果を調整するのがポイントです。動画もありますよ。
その後funkunさんも試されてますが、送信機が純正なためあまり良い感じには飛ばなかったようです。
で、これは後に続くプロジェクトのための第一歩なわけですが、とりあえず現状
動画で言えば25秒~35秒が左右にくいくい振ってみたところ。墜落間際の48秒からが前後にくいくい振ってるところです。
悪いところ。まずミソります。胴体がぶら下がってる分の力に抵抗できないので、水平に復元するわけでもないくせに傾いた状態を維持もできません。左右の操作バランスもすごく悪いです。つまるところピタホバ以外をさせるとサイクリック操作を止めたらろくなことになりません。
スワッシュ出力ポールは長い方の足で、プロポ設定はDRが75%のEXPが50%くらいです。
作り方は基本funkunさんと同じで簡単そのものです。まずは予備のブレードにリンクを接着します。
 |
| 写真は接着前ですが、こいつを本来ある場所に接着します。要は動かなければいいだけです。 |
ちょうどY911用の回り止めが二本あるスワッシュがあったので、これを使います。

V911の機体側は斜め後ろ45度に回り止めホルダがありますが、ここにスワッシュの後ろ側が来るように45度反時計回りにずらして装着します。

サーボロッドが苦しくなりますが、サーボホーンのニュートラルを上にずらしたり、ロッドをめいっぱい伸ばしたりしてなんとかつじつまを合わせました。特に加工は無しでOKでしたよ。

そのままでは数秒しか浮かないので、ブレードに0.5~1.5g程度のウェイトを貼ります。回転モーメントが増えればよいので、重いものを外周に貼るほど安定します。

 |
| 完成図。サーボロッドがかなり苦しそう |
というわけでそこそこ飛ばすことはできますが、このままではあまり意味はありません。(飛ぶと言うこと自体に感動しますが)
ミソが消えないと傾けたまますっ飛ばしたりできないし、見た目上バーが無いのと、少しだけ電池が
長持ちするという以外、純正に対するメリットがありません。
KKDDMMさんの作例ではこの後、主翼の剛性をいろいろ調整してフラッピング等で安定度を稼ごうとしています。うちの場合は後付でジャイロをなんとかくっつけて、V911基板を生かしたまま介入してなんとかインチキバーレスシステムができないかと思っています。
とはいえ正統派の制御ができるわけではないので錘安定化より良い結果がでる保証は全くありませんし、まだ実験回路すら作ってないので失敗の可能性大です。いちおう乞うご期待ということで。
2013年6月3日
HobbyKIngのC05M
RCGでは、SuperCPのブラシレスと言うとHobbyKingのC05Mを推薦する人がとても多いです。


理由は安いからと、適度な回転で純正コアレスに似たマイルドな飛び方をするからだそうです。
別件でHobbyKing通販をする機会があったので、ついでにぽちっと混ぜてみました。円安にはなりましたがそれでも$15は確かに安いです。

なんかシャフトがお尻に突き出てますね!
実はピニオンを叩き込むときに作業が雑だったみたいで、動作確認すらしないうちにシャフトが折れました。。。
慌てて以前みかけたつーてんさんのブログと同じように1.5mmのドリルを買ってきてどこのご家庭にでもあるグラインダーでさっくりカットして修理したのが上の姿です。
 |
| 上が折れたシャフト。下側のCリング溝からぽっきり行きました。 下はドリル歯を切った代替品。 |
グラインダーカットを失敗することも考慮して長めに切ったのと、元々SuperCPの希望ピニオン位置からするとシャフトが長かったのでだいぶ余りました。まあ別に困らないからいいか…
Cリングはついてないのでピニオン側から軸を押すとぐいっとアウトランナーが外れます。でも長強力磁石ですから押さない限り外れるわけないし、仮に浮いてもピニオンがひっかかるので分離はしないでしょう。

機体への装着はこんな感じです、ってただ付けただけですが。。
スキッド部に乗せてあるのは元々乗ってたHP03S。薄いですねえ。重量も大きさに見合うくらいで、C05Mの方が1gくらい重いです。
サーボとのクリアランスは、8Tピニオンが無くてたまたま余ってた9Tを使ったので、ピニオン側が大きいためにSuperCP純正メインギアでぎりぎり収まりました。8Tだったら少し大きいGeniusCPメインギアが必要になるでしょう。
今までの13500kvより遅い11000kvですが、ピニオンが9Tなのであまり違いは無いです…。けっきょく全力では回さずスロットルで絞って70%くらいで回してるので、効率も上がらずフライト時間もHP03Sと大差無し。あとで8Tピニオンを注文せねば…。
1g重い以外に唯一の違いは、回転のスタートがスムーズです。BLHeliのスタートアップ設定をデフォルトに戻したら、HP03Sの時の最初のガゴガゴっが無くて、ふいーーーーんって気持ちよく回転が上がっていきます。まあHP03Sでは回って満足だったので徹底してセッティングを詰めたわけでは無いんですが…。
まあ、そんなわけで安いしパワーも十分あります。大物は送料が高いHobbyKingですが、こういう軽いものなら国内と変わらないくらいの送料です。納期もみぽりんには負けますがBanggoodと違って1週間かそこらでやってくるので、軽いパーツはお勧めですねー。
2013年5月29日
GeniusFPブレード マイクロJSTコネクタ 近況とか
すっかり更新が止まっちゃいました。

ヘリに飽きたわけでは全く無いのですが、もくもくと飛ばしてるだけなのでさっぱり話題がありません。
最近はあまり飛ばすチャンスも無いので、なるべくSuperCPだけ飛ばしています。V911はたまに対面の練習する程度。といっても対面だと安定度はがくっと下がるのでV911でもまだまだ練習になるんですけどね。
SuperCPは6畳間をいっぱいに使えば、右旋回でくるくるまわる分には墜落せずにいくらでも回れるようになってきました。左回転がまだ全然ダメですが、注意してその場ホバ回転はできるので、旋回時も90度くらいずつ回ったときにちゃん機体を見て前後修正を入れるようにすればいい気がします。
しかし怖さが減ったとは言っても破壊力はあるので、やっぱり部屋フリップとかはこの機体じゃやりたくないなー。。 これ以下となると、nanoCPXかFBL80しか無いですよね…
SuperCPといえば、先週派手にクラッシュして、ついにフェザリングシャフトが曲がりました。みぽりん(注:ヘリモンスター)で即日注文して次の日には交換完了。クラッシュ前よりも振動が減った気がするので、今までも少しは曲がってたのかもしれません。
注文のついでに何かイロモノをつけてみたくて、GeniusFPのブレードを買って装着してみました。mini/SuperCPのブレードよりネジ止め部の厚みがかなり薄かったので、薄いゴム板を挟んで無理やり装着。
 こいつは湾曲と、内周ほど幅が広い=ねじり下げ付きなので、揚力の効率が良くなるはずです。マイナスピッチができなくなりますがあと10年くらいインバートできそうもないうちのヘリであれば使用上まったく問題ありません。
こいつは湾曲と、内周ほど幅が広い=ねじり下げ付きなので、揚力の効率が良くなるはずです。マイナスピッチができなくなりますがあと10年くらいインバートできそうもないうちのヘリであれば使用上まったく問題ありません。
揚力が増えた結果、回転が落とせて怖さが減るかなーと思ったのですが、それよりもブレードの重さが減ったことが効いて凶器度が下がった感じはします。自分に当たっても怪我しないかも?くらいの微妙な感じ。
モーター回転数に余裕があるので、背面を捨てずに攻撃力を下げるためには、もしかしたらnanoCPXなんかのちんまいブレードを付けてみてもいいかも知れませんね。
まあ、ねじり下げのせいでゼロピッチでもものすごい揚力が出ちゃうので、暴走して天井に激突しないためにはピッチカーブでゼロピッチ相当にしたい範囲を相当なマイナスピッチにしとかないといけないです。うちではマイナス30%くらいにあって、回転方向にブレードを折りたたんでの収納時はこんな感じになります。
まあでも、いつまでも変なプロポ設定で飛ばしてるとピッチ操作の練習にはならんのでしばらく飛ばしたら次は純正ブレードにします。。
もうひとつヘリネタで。
Origin/OverSkyのブラシレスESCに付いる茶色いコネクタがあります。
 BLHeliのセットアップガイドだと無情にも、このコネクタの3本足に書き込み用の配線をつなげと書いてあるとおり、こいつはプログラミング用のコネクタです。
BLHeliのセットアップガイドだと無情にも、このコネクタの3本足に書き込み用の配線をつなげと書いてあるとおり、こいつはプログラミング用のコネクタです。
こんな細いところに無理して半田付けしなくても、このコネクタに刺さる端子があれば最高なのに!とお思いの皆さん。ありました。




ヘリに飽きたわけでは全く無いのですが、もくもくと飛ばしてるだけなのでさっぱり話題がありません。
最近はあまり飛ばすチャンスも無いので、なるべくSuperCPだけ飛ばしています。V911はたまに対面の練習する程度。といっても対面だと安定度はがくっと下がるのでV911でもまだまだ練習になるんですけどね。
SuperCPは6畳間をいっぱいに使えば、右旋回でくるくるまわる分には墜落せずにいくらでも回れるようになってきました。左回転がまだ全然ダメですが、注意してその場ホバ回転はできるので、旋回時も90度くらいずつ回ったときにちゃん機体を見て前後修正を入れるようにすればいい気がします。
しかし怖さが減ったとは言っても破壊力はあるので、やっぱり部屋フリップとかはこの機体じゃやりたくないなー。。 これ以下となると、nanoCPXかFBL80しか無いですよね…
SuperCPといえば、先週派手にクラッシュして、ついにフェザリングシャフトが曲がりました。みぽりん(注:ヘリモンスター)で即日注文して次の日には交換完了。クラッシュ前よりも振動が減った気がするので、今までも少しは曲がってたのかもしれません。
注文のついでに何かイロモノをつけてみたくて、GeniusFPのブレードを買って装着してみました。mini/SuperCPのブレードよりネジ止め部の厚みがかなり薄かったので、薄いゴム板を挟んで無理やり装着。

揚力が増えた結果、回転が落とせて怖さが減るかなーと思ったのですが、それよりもブレードの重さが減ったことが効いて凶器度が下がった感じはします。自分に当たっても怪我しないかも?くらいの微妙な感じ。
モーター回転数に余裕があるので、背面を捨てずに攻撃力を下げるためには、もしかしたらnanoCPXなんかのちんまいブレードを付けてみてもいいかも知れませんね。
まあ、ねじり下げのせいでゼロピッチでもものすごい揚力が出ちゃうので、暴走して天井に激突しないためにはピッチカーブでゼロピッチ相当にしたい範囲を相当なマイナスピッチにしとかないといけないです。うちではマイナス30%くらいにあって、回転方向にブレードを折りたたんでの収納時はこんな感じになります。
 |
| ロップイヤー的な感じ |
もうひとつヘリネタで。
Origin/OverSkyのブラシレスESCに付いる茶色いコネクタがあります。
こんな細いところに無理して半田付けしなくても、このコネクタに刺さる端子があれば最高なのに!とお思いの皆さん。ありました。

我らがJSTのSH 1mmピッチ3ピンコネクタがぴったりです。秋葉原の千石電商でユニバーサル基板とか見てるときにたまたま発見しました。値段も20円とか30円とか安かったです。
ちと最低個数が多めですが通販でも買えます。
これで、先日作ったBLHeliBox用の標準ピンヘッダへの変換コネクタを作ってー

繋いだら、さっくり認識しましたー。

写真はヘリモンのdouble ESCのメイン側に購入時から書かれていたファームです。BLHeliの10.0ですから結構あたらしめバージョンですね。
テール側は何が書かれているのかrev. errorとなってわかりませんでした。
そうそう、BLHeliBoxの電源ですが、P氏がどうせヘリに繋ぐんだしわざわざ5Vだか3.3Vだか給電せんでもリポ直結で動くやろ、というので無理やりArduino基板の電源に電池を繋いでみたら問題なく使えました。こりゃ楽ですねー。これやって以来一度もパソコンに繋がずBox運用してます。
今後の展開としては、HobbyKingにMultiWii関係をいろいろ注文してはあります。といってもTigerさんとこで話題になってるクワッドではなくて、普通のnanoWii基板です。これでシングルローターヘリを飛ばしたいなー、と。
450クラスでは既に飛ばしてる方がいますが、テールがモーターダイレクトのマイクロヘリでまだ前例がいなさそうです。
2013年5月15日
BLHeliBox
今日は広い部屋で久々に飛ばしたんですが、はじめてSuperCPでよちよちと旋回ができました。V911だとあんなに簡単でどんな狭いところでも余裕なのに、恐ろしいというだけでこんなにも難易度が違うもんですね…。
テールローターの反動で走り出すのを止めながらゆっくり旋回もできたし、少し前に走らせながら対面になったところで止めて対面ホバもできました。おお、止まっていればV911とかわらんので、対面ホバに入ってしまえば難易度は同じですね!
という今日この頃です。機体の性能がまったく発揮できずにSuperCP君が泣いております。
といってもソフトは市販されているLCD+KeyPadシールド用に設計されているので、シールドを家にあった秋月パーツで貧乏くさく作っただけです。地味にタクトスイッチが足りなくて掘り出すのに苦労しました…。
まず、LCD+KeyPadシールドの解説と回路図は アンドロシティwiki にあります。
で、作りました。裏面と表面。P氏にきたなくてコピーする気がおこらんと怒られました。


誰もがうんざりしている0.5ピンずらしの嫌がらせ部はこんなかんじ。



電源部作ってないのでUSB給電ですが、パソコンがあればパソコンからのプログラマとして、パソコンが無ければ単体動作でBLHeliファームのパラメータ参照、変更ができます。
使用風景はこんなかんじ。
使用風景はこんなかんじ。

動作中の機体にさくっと繋いで設定をぴこぴこっと変更…てのがF1みたいでかっこいいです。
インドア限定のスーパー引きこもりCP君には意味ありませんけどね。
SuperCPのモーターPWM出力
ブラシレス化で不安を感じた点の一つ、スロットルホールド時のモーターの切れが悪い点を調査しました。

不安を感じているのは
- ブラシレス化+BLHeliのガナバー(TXモード)を入れてあると、スルットルホールドを入れても1秒間同じくらいの回転数で回っちゃう。
- そもそもブラシレス化する前からなんかモーター音が消えるまでにラグがある気がしていた。
の2つです。
まあ、どう考えてもSuperCPの出力が怪しいのでまずは駆動PWM信号を見てみます。

……。下段のスロットルホールドONから、たっぷり1250msはモーターPWM信号が出ています。1.2秒ですよ!
といっても出力がじわじわ下がってる感じはあるので、1.2秒かけてモーターを止めているつもりなんでしょうけど、別に逆転したりブレーキしたりするわけではないのでもったいぶる意味はありません。すみやかに止めていただきたい。
実際にはスロットルホールドを入れた直後から駆動パワーがふわっと抜ける感じの音はするので、クラッシュ対策なりFET焼け対策としては機能してるんでしょうけど、なんかやなかんじ。
そして、ガナバーモードをONにするとこのじわじわ下がってる間も、ブラシレスはきっちり回転を維持しようとしてくれる気がします。でもこの信号の取り方じゃブラシレスにかかってる駆動トルクはぜんぜんわからんので実際はよくわからない。
当面は、ガナバーOFFで使えばちゃんとブラシモーターと同程度には、スロットルホールドをパチンした直後から回転がふわっと落ちるのでそれで使います。
 |
| 一応ブラシレスの駆動コイル信号もとってみた。 でも回転がだんだん落ちてる、てこと以外はわかりませんね。 |
現時点の理解:
- やっぱりSuperCPの基板はモーター出力を止めるのがちと遅い。
- でも「止め始める」のはすぐ行うし、実際はローターだってぜんぜん止まらないのだからあまり害は無いと思う。
- でもなんか気分良くない。
2013年5月12日
SuperCPブラシレス XP-7A版 フィルタ定数調整
前回の記事では、Origin double ESC (ヘリモンdouble)を使い、100Ω&0.1uFのCRフィルタを入れて、HP03SモーターでSuperCPを飛ばしました。
それなりにうまく行きましたが、
まずフィルタ定数の見直しから。CRフィルタではありますが、Rの部分はSuperCPの信号出力側にも含まれている可能性があるので、Rを減らしたからといってうまいことフィルタが弱くなる保証はありません。やっぱり正統派のCで調整します。
てことで10nF=0.01uFのセラコンを掘り出して交換。今度はチップ部品じゃないので見やすい。

オシロで信号を見てみると…
実はこんくらい大丈夫かと思って組んでみたのですが、やはりこのノイズはESC様が拾ってしまうようで、そこそこ動くもののたまにぴくっぴくっとモーターが動きます。あと初期化のピーポーもノイズを拾ってスロットル最低のままなのにピーポーピーポーうるさい。
こんなでかいコンデンサをパラにするのはかんべんしてほしいので、抵抗で調整します。200, 470と試してみて、470Ωがよさげだったのでこれに決めました。
以前みたいにハーフスロットルのテールがなだらかになって広い幅に誤認識されることがなくなると思います。 残留ノイズは心配ですが、このくらいESC側のフィルタではじいてくれると期待して、今度はXP7Aに接続してみます。

あ、前提として、SuperCPの出力PWM信号は2kHzとわかってますんで、XP7A側はコンデンサを一箇所除去しておきます。これはBLHeliのサポートESCドキュメントに指示がありますが、写真抜粋しておきます。このRemoveと書いてある箇所です。

試運転してみると、ゼロスロットルを認識して初期化シーケンスに反応してくれます。弱スロットルにも反応して、リニア感が出ていい感触です。
機体への取り付けは相変わらず輪ゴムで…
 前方ににょきっと3本出てるピンヘッダはBLHeliセッティング用の書き込み線です。そりゃむき出しは嫌だったんですが、ピンヘッダ3本は0.1g、ピンソケット3本は0.4gなので重さに負けました。まあ動力線じゃないし…
前方ににょきっと3本出てるピンヘッダはBLHeliセッティング用の書き込み線です。そりゃむき出しは嫌だったんですが、ピンヘッダ3本は0.1g、ピンソケット3本は0.4gなので重さに負けました。まあ動力線じゃないし…
そうそう、無意味にdouble ESCだったのを、シングル用の小さいXP7Aに変えて、さぞ軽量化されたかと思いきや…
まとめ:
それなりにうまく行きましたが、
- メインのみブラシレスなのに無駄に高価なdouble基板を使っている
- フィルタが効きすぎて弱スロットルが実現できない
- フィルタのせいかBLHeliファームの設定か不明だけど、スロットルホールド時のモーター停止が遅い
まずフィルタ定数の見直しから。CRフィルタではありますが、Rの部分はSuperCPの信号出力側にも含まれている可能性があるので、Rを減らしたからといってうまいことフィルタが弱くなる保証はありません。やっぱり正統派のCで調整します。
てことで10nF=0.01uFのセラコンを掘り出して交換。今度はチップ部品じゃないので見やすい。

オシロで信号を見てみると…
 |
| スロットルOFF時 1Vくらいのノイズが残ってます。うーん微妙… |
実はこんくらい大丈夫かと思って組んでみたのですが、やはりこのノイズはESC様が拾ってしまうようで、そこそこ動くもののたまにぴくっぴくっとモーターが動きます。あと初期化のピーポーもノイズを拾ってスロットル最低のままなのにピーポーピーポーうるさい。
こんなでかいコンデンサをパラにするのはかんべんしてほしいので、抵抗で調整します。200, 470と試してみて、470Ωがよさげだったのでこれに決めました。
 |
| スロットルOFF まだ少しだけノイズがあるっちゃあるんですが… |
 |
| 弱スロットル時 きっちり振幅でています。いいかんじ。 |
{kind=link}

あ、前提として、SuperCPの出力PWM信号は2kHzとわかってますんで、XP7A側はコンデンサを一箇所除去しておきます。これはBLHeliのサポートESCドキュメントに指示がありますが、写真抜粋しておきます。このRemoveと書いてある箇所です。

試運転してみると、ゼロスロットルを認識して初期化シーケンスに反応してくれます。弱スロットルにも反応して、リニア感が出ていい感触です。
機体への取り付けは相変わらず輪ゴムで…

- Origin double ESC 3.8g
- XP-7A ESC 3.0g
まとめ:
- SuperCPのブラシレス化ノイズフィルタは470Ω & 0.01uFのCRフィルタが良い。少しだけノイズが残るので心配なら1kΩでも良いかも
- 重量はあまり変わらないので、将来テールもBL化したいなら無駄にdouble ESCを買っといても良い
- メインブラシレスのみの場合でも、値段差と品質を考えると、XP7AよりもOrigin 10Aを選択するのがよさそうな気がする (Origin 10AはFETの抵抗も少ないので好評)
2013年5月10日
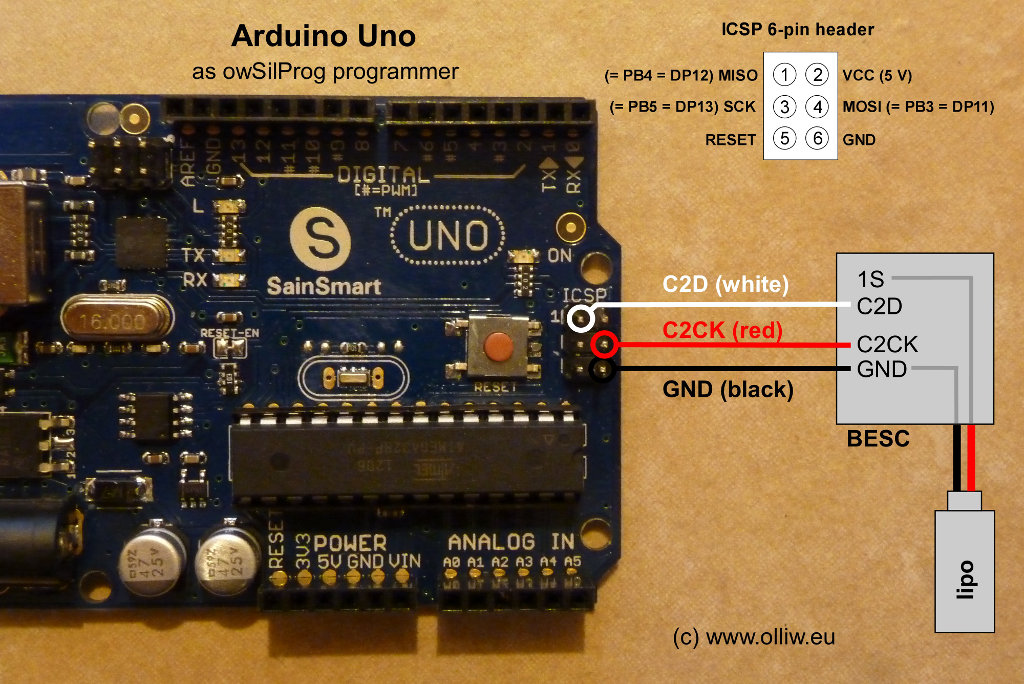
XP-7AにBLHeliファーム書き込み ( arduino製プログラマ利用 ) SuperCPで使えました
ヘリモンさんで買ったもう一つのESC、XP7Aの方をまだ使っていませんでした。
こいつは純正ファームではサーボ信号食べるモードなので、マイクロヘリに直結するには間違いなくBLHeliの導入が必要です。
さて、書き込みアダプタの選定ですが、純正USBアダプタは$20くらいします。互換品もいくつかあるのですが、送料もあるし国内だと http://mfc200804.ocnk.net/product/367 なんかがリーズナブルなところだと思います。
BLHeliの場合、PC接続はアップデート以外にも設定ツールをつないでぽちぽち細かい設定をするときに使えるので、(ヘリモンのdouble ESCみたいに)最初からBLHeli書き込み済みのESCを持ってる人でもプログラマは持っていて損はないと思います。
で、もうひとつの選択肢としてarduino(というかATMEGA)に書き込んで使えるowSilProgというソフトでもBLHeliの書き込み、設定が可能です。
このarduino製プログラマは、液晶シールドを手に入れれば BLHeliBoxという携帯セットアップツールの機能を追加したバージョンもあります。 (作成例。かっこいいです。 http://nob-heli.blogspot.jp/2012/10/blheliboxblheli.html )
なので、後のことも考えて、あえてarduinoを手に入れて、そこにSilProgを書き込んで書き込み機にするという回り道を選択しました。
arduinoは USBシリアル変換+ピン配の標準化されたボード+ATMEGA+ブートローダ、があれば成立しますが、買えばとても安く配布してくださってる方がいます。海外通販なら完成品もこのくらい安いです。
私の場合は、最初の1個の書き込みに使えるFT232やFT245は元から持っているので、秋月基板150円に、ATMEGA328Pを挿してFT232のビットバングモードで書き込みする方法を取りました。
http://www.geocities.jp/arduino_diecimila/bootloader/ で紹介されてるとおりに実行して、ばっちり成功しました。(電源はUSBから取るので外部電源供給は省略しました。あとセラロックに繋ぐ22pFも無かったので省略…。無くてもたいていは動きます。)
んで、しばらくLEDブリンクスケッチとかでarduino遊びをした後、いよいよowSilProgを書き込みます。
いったいどこから書き込むのかと思いましたが、 OlliWさんの解説ページに、必要なファイル一式詰め合わせzipが置いてあります。
これを拾ってきて解凍すると、AvrBurnTool_v101.exeてのが入っていますが、これがarduinoにowSilProgのHEXファイルを書き込むツールです。BLHeliBox版を作るときもこれで書き込みます。(owSilProgやBLeliBoxを書き込んでもarduinoのブートローダは残ってますので、いつでもこの方法やarduinoのIDEで好きなプログラムを再書き込みできます)
んで、owSilProgの書き込みが成功したら、いよいよXP-7Aを繋ぎます。
接続ポイントはBLHeliの対応ESC紹介ドキュメント (BLHeli supported SiLabs ESCs.pdf) に詳しくかかれてますのでそっちを参照してください。
基本的にどのESCも、黒のGND、赤のクロック、白のデータを繋ぐだけです。
てことは実際認識させるときはESCにリポを繋いで電源供給してやる必要があります。黒のGNDは無理して細かい箇所にハンダ付けしなくても、電池のGNDと共通だと思います。
クロックとデータは、秋月arduinoでしたらICSP端子に繋ぎます。

ピン見えないですね… 本家にUNOの場合の写真 http://www.olliw.eu/uploads/owsilprog-arduino-uno-scheme-02-wp.jpg があるのでこれと同じです。
あとはリポを繋いで電源を供給して、パソコン側でBLHeliTool_v120.exeを起動します。今回のXP-7AはそもそもBLHeliが入ってないので、3番目のタブ「Flash BLHeli to BESC」に行って、それっぽものを選んでPortでarduinoのUSBシリアルのCOMポートを指定してFlashします。
で、それっぽく成功メッセージが出たら、Setupタブに戻ってreadを押すと、現在のBLHeli設定が表示されます。

めでたしめでたし。
ここで試しにSuperCPに繋いでみると、今まで使ってたdouble ESCと同じパターンで、
と反応して、ちゃんとローターも回りました。
ただ上の設定を見てわかるようにデフォルトはガバナーモードで動いてるので、このままだとだいぶ今までとは使い方が違います。飛ばすのはちゃんと設定を理解してからにします。
というわけで確認できたことは:
こいつは純正ファームではサーボ信号食べるモードなので、マイクロヘリに直結するには間違いなくBLHeliの導入が必要です。
さて、書き込みアダプタの選定ですが、純正USBアダプタは$20くらいします。互換品もいくつかあるのですが、送料もあるし国内だと http://mfc200804.ocnk.net/product/367 なんかがリーズナブルなところだと思います。
BLHeliの場合、PC接続はアップデート以外にも設定ツールをつないでぽちぽち細かい設定をするときに使えるので、(ヘリモンのdouble ESCみたいに)最初からBLHeli書き込み済みのESCを持ってる人でもプログラマは持っていて損はないと思います。
で、もうひとつの選択肢としてarduino(というかATMEGA)に書き込んで使えるowSilProgというソフトでもBLHeliの書き込み、設定が可能です。
このarduino製プログラマは、液晶シールドを手に入れれば BLHeliBoxという携帯セットアップツールの機能を追加したバージョンもあります。 (作成例。かっこいいです。 http://nob-heli.blogspot.jp/2012/10/blheliboxblheli.html )
なので、後のことも考えて、あえてarduinoを手に入れて、そこにSilProgを書き込んで書き込み機にするという回り道を選択しました。
arduinoは USBシリアル変換+ピン配の標準化されたボード+ATMEGA+ブートローダ、があれば成立しますが、買えばとても安く配布してくださってる方がいます。海外通販なら完成品もこのくらい安いです。
私の場合は、最初の1個の書き込みに使えるFT232やFT245は元から持っているので、秋月基板150円に、ATMEGA328Pを挿してFT232のビットバングモードで書き込みする方法を取りました。
http://www.geocities.jp/arduino_diecimila/bootloader/ で紹介されてるとおりに実行して、ばっちり成功しました。(電源はUSBから取るので外部電源供給は省略しました。あとセラロックに繋ぐ22pFも無かったので省略…。無くてもたいていは動きます。)
んで、しばらくLEDブリンクスケッチとかでarduino遊びをした後、いよいよowSilProgを書き込みます。
いったいどこから書き込むのかと思いましたが、 OlliWさんの解説ページに、必要なファイル一式詰め合わせzipが置いてあります。
これを拾ってきて解凍すると、AvrBurnTool_v101.exeてのが入っていますが、これがarduinoにowSilProgのHEXファイルを書き込むツールです。BLHeliBox版を作るときもこれで書き込みます。(owSilProgやBLeliBoxを書き込んでもarduinoのブートローダは残ってますので、いつでもこの方法やarduinoのIDEで好きなプログラムを再書き込みできます)
んで、owSilProgの書き込みが成功したら、いよいよXP-7Aを繋ぎます。
接続ポイントはBLHeliの対応ESC紹介ドキュメント (BLHeli supported SiLabs ESCs.pdf) に詳しくかかれてますのでそっちを参照してください。
基本的にどのESCも、黒のGND、赤のクロック、白のデータを繋ぐだけです。
てことは実際認識させるときはESCにリポを繋いで電源供給してやる必要があります。黒のGNDは無理して細かい箇所にハンダ付けしなくても、電池のGNDと共通だと思います。
クロックとデータは、秋月arduinoでしたらICSP端子に繋ぎます。

ピン見えないですね… 本家にUNOの場合の写真 http://www.olliw.eu/uploads/owsilprog-arduino-uno-scheme-02-wp.jpg があるのでこれと同じです。
{kind=link}
あとはリポを繋いで電源を供給して、パソコン側でBLHeliTool_v120.exeを起動します。今回のXP-7AはそもそもBLHeliが入ってないので、3番目のタブ「Flash BLHeli to BESC」に行って、それっぽものを選んでPortでarduinoのUSBシリアルのCOMポートを指定してFlashします。
で、それっぽく成功メッセージが出たら、Setupタブに戻ってreadを押すと、現在のBLHeli設定が表示されます。

めでたしめでたし。
ここで試しにSuperCPに繋いでみると、今まで使ってたdouble ESCと同じパターンで、
- 電源ONでピポパ
- スロットルちょいONでピー(低)
- スロットル0に戻すとポー(高)
と反応して、ちゃんとローターも回りました。
ただ上の設定を見てわかるようにデフォルトはガバナーモードで動いてるので、このままだとだいぶ今までとは使い方が違います。飛ばすのはちゃんと設定を理解してからにします。
というわけで確認できたことは:
- FT232RLを持っていれば、秋月arduinoだけでBLHeliの書き込みが可能です。
- XP7A(ESC)にBLHeliを導入すれば、問題なくSuperCPでHT03Sを回すことが可能です。(ただしSuperCPからの信号取り出しにCRノイズフィルタは必要です)
2013年5月6日
GW9928 / 9958 少しヒラー化 これはバーレス練習にいいかも!
パワーの面では残念と言った9928ですが、スティックの反応がものすごく弱いのに、6畳間で対面旋回しようとすると妙に難しくて壁にぶつけることがありました。
それで気づいたんですが……この子、滑ってない?(わくわくドキドキ)
これまでのあらすじ
普段V911+ヘリオスパドルで飛ばしてると、1秒以内のスティック操作は100%ベル舵 (=スタビ回転面はまったく動かず、スタビ回転面を支点にローター面と機体が敏感に傾く) になり、スティックを戻すと瞬時にホバ状態に戻る(ただし機体の横方向の速度は残ってるので少し走って止まる)というぬるま湯操作に慣れています。
したがって、CP機への壁であるところの、スティックを戻してもその時点の機体姿勢のまますっとんでいくという操作で苦労してるわけです。
このための移行機種として一応バーレス固定ピッチが存在しますが、なんかもったいないんですよね! ほぼ3D機が作れるだけの技術素材を使ってわざわざ固定ピッチにダウングレードした機体を買うって…
というわけで私のようにいきなりフライバー固定ピッチから飛び級でCP機を買うのは普通のことではあるんですが……6畳間という制限がかかると本当にSuperCPは難しいです。なにも3Dやりたいなんて思ってないんですよ。せめてV911でさんざんやってる8の字とかサークル、ノーズインでコーンをやりたい…のですが、6畳間だと破壊力が怖くて対面ホバまでもまだ行きません。
そう、ヒラーならね。
というわけで、なんとか安価にV911/9958系で自立安定性を取り払ってCPの練習をしたいのですが、うちではV911でスタビを異常に軽くしても固定しても撤去しても、ホバ維持がやっとのできそこないになってしまい、とても6畳間でCP練習ができるとは思えないしろものでした。
で、そうなると選択肢はごくわずかしかありません
というわけで9928/9958
という目的でGW9928を買ってきたので、滑ったのを見た瞬間に、いけるかも!という感触がこみ上げてきました。
もちろんこのルートも改造大好きKKDDMMさんが山ほど試していらっしゃいまして、
http://plaza.rakuten.co.jp/ringmaker/diary/201201260000/
walkera旧型機のヘッドをごっそり移植しています。その後の改良の変遷も必読です。
こういった90度フライバーもいずれ試すとして、とりあえずは今ある手持ちのパーツででなんとかしたい。というわけで、
・純正スタビ棒からウェイトを撤去
→予想通りベル成分が消滅して小舵きかない。滑るっちゃ滑るけど反応も弱くて単に舵が効かないだけなので、大きく傾けると戻せないまま壁に当たるだけです。浮かないわけじゃないけどあまり楽しくないです。
・ウェイトを撤去したまま、軽量パドルを装着
これで飛ばすと…すごいです!
SuperCPの感覚とすごく似てる。舵もぎゅいんっと入るし、離すとそのままの体勢を維持。いきなり楽しく飛ぶバランス良い設定が出ました!
この感動は文章じゃ伝えられないので、動画を見てください。
勝手にはミソりません。顔の前で止めるようなピタホバも可能です。
途中でぎゅんぎゅん左右に振っているのを見ると、スタビの回転面がローターと一緒にぎゅいぎゅい傾いてるのがわかると思います。だから止めるときは修正舵を入れないと止まりません! 特に30秒すぎくらいで小刻みに左右にゆすってますが、これだけの小舵にもかかわらずちゃんとスタビがローターと一緒に左右に傾いています。
とはいえ、ジャイロで止めてるわけじゃないので、長周期で継続的に機体がブレードを引っ張るような力には対抗できずそれなりの自己復元はします。傾けてすっとばしても1秒くらいで戻ってきて揺り戻して、結果的にゆっくり部屋いっぱいくらいの範囲でミソります。まあ無意識にゆり戻しを止める操作を入れちゃうので最初は自分でも気付きませんでしたけど。。
でもインドアに限れば、V911よりもかなーりSuperCPに近い挙動になりました。ほんとに驚きの効果です。
今のところGW9928で試しただけです。なので、重い機体+ハイパワー=高いヘッドスピード がヒラーパドルの効果を高めている可能性はあります。まあでも、V911モーターでも高速ヘッドにする方法は確立済みですからね。
それと、傾けたときに長周期で戻っちゃってゆっくりミソるのは、操作でどうにでもなるので不快ではありませんがCP練習的にはもう少し弱めたい。これはスタビを軽くしすぎたせいもあると思うので、結局昔ながらのフライバーの調整で皆さんがいろいろ苦心しているように、バランス追及になるのかな・・・
GWの機体はBNFが手に入らないので、今のところ9958は持ってません。けど、こんなこともあろうかとコピー機体のSH6032のフレーム+ヘッド一式を手に入れてあるので、これで9958系のヒラー機も作ってみます。
それで気づいたんですが……この子、滑ってない?(わくわくドキドキ)
これまでのあらすじ
普段V911+ヘリオスパドルで飛ばしてると、1秒以内のスティック操作は100%ベル舵 (=スタビ回転面はまったく動かず、スタビ回転面を支点にローター面と機体が敏感に傾く) になり、スティックを戻すと瞬時にホバ状態に戻る(ただし機体の横方向の速度は残ってるので少し走って止まる)というぬるま湯操作に慣れています。
したがって、CP機への壁であるところの、スティックを戻してもその時点の機体姿勢のまますっとんでいくという操作で苦労してるわけです。
このための移行機種として一応バーレス固定ピッチが存在しますが、なんかもったいないんですよね! ほぼ3D機が作れるだけの技術素材を使ってわざわざ固定ピッチにダウングレードした機体を買うって…
というわけで私のようにいきなりフライバー固定ピッチから飛び級でCP機を買うのは普通のことではあるんですが……6畳間という制限がかかると本当にSuperCPは難しいです。なにも3Dやりたいなんて思ってないんですよ。せめてV911でさんざんやってる8の字とかサークル、ノーズインでコーンをやりたい…のですが、6畳間だと破壊力が怖くて対面ホバまでもまだ行きません。
そう、ヒラーならね。
というわけで、なんとか安価にV911/9958系で自立安定性を取り払ってCPの練習をしたいのですが、うちではV911でスタビを異常に軽くしても固定しても撤去しても、ホバ維持がやっとのできそこないになってしまい、とても6畳間でCP練習ができるとは思えないしろものでした。
で、そうなると選択肢はごくわずかしかありません
- ジャイロ無しの古典バーレスでは安定しない → 3軸ジャイロ機にしないなら、フライバーは必須
- フライバーがあっても自立安定性は殺したい → ベル比を落として、フライバーとブレードを同時に動かすしかない
- でも舵の反応もそこそこクイックじゃないと6畳間はつらい → 軽量フライバー + ヒラーパドル
というわけで9928/9958
という目的でGW9928を買ってきたので、滑ったのを見た瞬間に、いけるかも!という感触がこみ上げてきました。
もちろんこのルートも改造大好きKKDDMMさんが山ほど試していらっしゃいまして、
http://plaza.rakuten.co.jp/ringmaker/diary/201201260000/
walkera旧型機のヘッドをごっそり移植しています。その後の改良の変遷も必読です。
こういった90度フライバーもいずれ試すとして、とりあえずは今ある手持ちのパーツででなんとかしたい。というわけで、
・純正スタビ棒からウェイトを撤去
→予想通りベル成分が消滅して小舵きかない。滑るっちゃ滑るけど反応も弱くて単に舵が効かないだけなので、大きく傾けると戻せないまま壁に当たるだけです。浮かないわけじゃないけどあまり楽しくないです。
・ウェイトを撤去したまま、軽量パドルを装着
 |
| プラ版とか無いので洋服の青山から来た ダイレクトメールのハガキを採用! |
 |
| 現状復帰できるようにセロテープ固定です。 わ、我ながら貧乏くさい・・・ |
これで飛ばすと…すごいです!
SuperCPの感覚とすごく似てる。舵もぎゅいんっと入るし、離すとそのままの体勢を維持。いきなり楽しく飛ぶバランス良い設定が出ました!
この感動は文章じゃ伝えられないので、動画を見てください。
勝手にはミソりません。顔の前で止めるようなピタホバも可能です。
途中でぎゅんぎゅん左右に振っているのを見ると、スタビの回転面がローターと一緒にぎゅいぎゅい傾いてるのがわかると思います。だから止めるときは修正舵を入れないと止まりません! 特に30秒すぎくらいで小刻みに左右にゆすってますが、これだけの小舵にもかかわらずちゃんとスタビがローターと一緒に左右に傾いています。
とはいえ、ジャイロで止めてるわけじゃないので、長周期で継続的に機体がブレードを引っ張るような力には対抗できずそれなりの自己復元はします。傾けてすっとばしても1秒くらいで戻ってきて揺り戻して、結果的にゆっくり部屋いっぱいくらいの範囲でミソります。まあ無意識にゆり戻しを止める操作を入れちゃうので最初は自分でも気付きませんでしたけど。。
でもインドアに限れば、V911よりもかなーりSuperCPに近い挙動になりました。ほんとに驚きの効果です。
今のところGW9928で試しただけです。なので、重い機体+ハイパワー=高いヘッドスピード がヒラーパドルの効果を高めている可能性はあります。まあでも、V911モーターでも高速ヘッドにする方法は確立済みですからね。
それと、傾けたときに長周期で戻っちゃってゆっくりミソるのは、操作でどうにでもなるので不快ではありませんがCP練習的にはもう少し弱めたい。これはスタビを軽くしすぎたせいもあると思うので、結局昔ながらのフライバーの調整で皆さんがいろいろ苦心しているように、バランス追及になるのかな・・・
GWの機体はBNFが手に入らないので、今のところ9958は持ってません。けど、こんなこともあろうかとコピー機体のSH6032のフレーム+ヘッド一式を手に入れてあるので、これで9958系のヒラー機も作ってみます。
2013年5月4日
GW9928 箱出しレビュー
Banggoodに頼んでいたGW9928が届きました。

飛ばした感じは… 重い。鈍い。これぞまさにピッグ! 上昇も鈍く、9958よりぜんぜん浮かない気がします。
ややため息をつきながらスペック測定に移ります。注目のスラストは…
あると言えばあるんだけど、ヘリオスモーターやSoloProモーターと変わらんし、ピックアップを犠牲にしてコアードにしたほどの違いは…
次は体重測定。
びっくりのフライト重量47.6g! スラスト66あっても18gしかペイロードがありませんよ!
参考までに、昨日紹介したスーパーV911はwalkeraの240mAh電池を積んで36gです。これでスラスト81gだから、ペイロードは45g…圧倒的だ。
充電機はP氏トラウマのUSB直結タイプ。これで普通のリポを充電すると破裂するので、絶対これをV911バッテリーに使わないでください。

気を取り直して、機体性能について。
mSR丸パクのヘッド構造は良いと思います。V911よりもジェントルでゆらっと動く感じは実機ぽくて好み。問題は体重と、あまりにもスワッシュからの出力が弱いこと。
スワッシュ出力は、スワッシュ出力とスタビの入力腕長さが同じ、てことはV911で言えば短い方のスワッシュ出力ボールしか付いてないので、その分負けています。これはスワッシュを移植するとか他機種のスワッシュ上半分を接着するとかで変更できそう・・・?(参考:KKDDMMさんの改造記事)
追記:いやでも、V911のベル直結じゃなくて、曲がりなりにもスタビのピッチを一度通しているので、スワッシュ作用角を増やしてもベル舵にはならずスタビがねじ切れるだけですね。ここは素直にパドルを付けてヒラー側を活用しないといけなそう。
重量はもう少し根本的な問題で… 内訳をまとめると

こんな感じで、全項目完敗。しかも一番重要な機体部分が大半という救えない…
つまり、対9958比で言うと、重量増をパワーで補い、そのために燃費が落ちて大容量電池が必要になった、という戦車開発や戦闘機開発でよくある残念作、と言えます。少なくとも現状はね。
つーか型番から言うと9958の方が後なんでしょうか? 型式はたぶん開発スタートの順に決まると思うので、9928を開発してた→いい感じの8mmコアレスモーターが普及してきた→さくっとメインフレームだけ変更した9958を作って発売した、という流れの可能性もありますね。
ノーマルではいまいちですが、前後ともモーターサイズが違うので、V911系を改造するためのパーツとしてはなかなか楽しそうです。

定番の名機9958ではなく、パワーアップ版と言われる9928をチョイス! こいつはあまりレビューを見かけないので細かく紹介します。
 |
| 電池一個しか付いてない。けち。 後は9958と同じようなかんじー。 でも容量は350mAhもあります。 |
 |
| いきなり核心! 大型のコアードモーターが付く専用フレーム。 miniCPとかV922と同サイズじゃないかなぁ。 |
 |
| テールモーターがなんか大きい。 そうです。7mmモーターです。(V911は6mm) |
 |
| モーターはSuperCPとかHP03Sでお馴染みのネジ止め。 なにげにピニオンが10Tです。 |
 |
| バッテリー端子はV911の新コネクタと同型っぽい。 極性も一緒だから電池は使えると思います。 でも充電器はダメ!(後述) |
まあ、予想通りモーターと電池以外は9958と一緒かな。
付属送信機には電池すらいれず、devo7e(deviation)でFlyskyバインド。9958と同様にラダーのみリバース、他は全て順方向です。
飛ばした感じは… 重い。鈍い。これぞまさにピッグ! 上昇も鈍く、9958よりぜんぜん浮かない気がします。
ややため息をつきながらスペック測定に移ります。注目のスラストは…
 |
| 66g! 9958箱出しが57gなのでまあまあ勝ってる。 |
次は体重測定。
 |
| 重い…重過ぎる。 電池も10gありますが、機体もキャノピーも重い。 |
参考までに、昨日紹介したスーパーV911はwalkeraの240mAh電池を積んで36gです。これでスラスト81gだから、ペイロードは45g…圧倒的だ。
 |
| V911は別に軽量化してないんだけど… しいて言えばキャノピー切除したくらい? |

気を取り直して、機体性能について。
mSR丸パクのヘッド構造は良いと思います。V911よりもジェントルでゆらっと動く感じは実機ぽくて好み。問題は体重と、あまりにもスワッシュからの出力が弱いこと。
スワッシュ出力は、スワッシュ出力とスタビの入力腕長さが同じ、てことはV911で言えば短い方のスワッシュ出力ボールしか付いてないので、その分負けています。これはスワッシュを移植するとか他機種のスワッシュ上半分を接着するとかで変更できそう・・・?(参考:KKDDMMさんの改造記事)
追記:いやでも、V911のベル直結じゃなくて、曲がりなりにもスタビのピッチを一度通しているので、スワッシュ作用角を増やしてもベル舵にはならずスタビがねじ切れるだけですね。ここは素直にパドルを付けてヒラー側を活用しないといけなそう。
重量はもう少し根本的な問題で… 内訳をまとめると
こんな感じで、全項目完敗。しかも一番重要な機体部分が大半という救えない…
つまり、対9958比で言うと、重量増をパワーで補い、そのために燃費が落ちて大容量電池が必要になった、という戦車開発や戦闘機開発でよくある残念作、と言えます。少なくとも現状はね。
つーか型番から言うと9958の方が後なんでしょうか? 型式はたぶん開発スタートの順に決まると思うので、9928を開発してた→いい感じの8mmコアレスモーターが普及してきた→さくっとメインフレームだけ変更した9958を作って発売した、という流れの可能性もありますね。
ノーマルではいまいちですが、前後ともモーターサイズが違うので、V911系を改造するためのパーツとしてはなかなか楽しそうです。
登録:
コメント (Atom)